
В Корее разрабатывают ИИ, позволяющий роботам осваивать высокоточные сборочные операции
- 1 день назад
- 3 мин. чтения
Корреспондент Гу Бон Хёк
- ИИ-модель для роботов получила название «DiSPo»
- Повышает успешность выполнения операций до 81%

В этом изображении, сгенерированном ИИ, показана ИИ-модель для манипуляции с многоуровневой детализацией «DiSPo» [Предоставлено KAIST]
Ожидается, что в будущем робот сможет осваивать высокоточные сборочные операции, просто наблюдая за действиями оператора на заводе.
24 июня KAIST сообщил, что исследовательская группа во главе с профессором факультета вычислительной техники Пак Дэ Хён разработала ИИ-модель для роботов «DiSPo», которая способна обучаться на небольшом объеме данных и регулировать детализацию движения робота в зависимости от рабочей ситуации, выполняя даже сложные манипуляции.
Существующие системы искусственного интеллекта для роботов могли выполнять высокоточные операции только после обучения на огромных объемах данных, полученных путем записи движений человека с очень короткими интервалами. Например, для обучения закручиванию винтов или вставке деталей в узкие щели требовался тщательный сбор огромного количества данных о движениях, что было сопряжено с большими затратами времени и средств.
Чтобы преодолеть эти ограничения, исследовательская группа разработала технологию искусственного интеллекта, позволяющую роботу предсказывать изменения в движениях и обучаться различным действиям. В частности, была внедрена новая функция, позволяющая в зависимости от рабочей ситуации делить движения на более мелкие элементы или регулировать их в более широких пределах. Исследователи реализовали эту функцию путем объединения модели пространства состояний «Mamba», эффективно обучающейся изменениям во времени, и диффузионной модели (Diffusion Model), генерирующей различные действия.
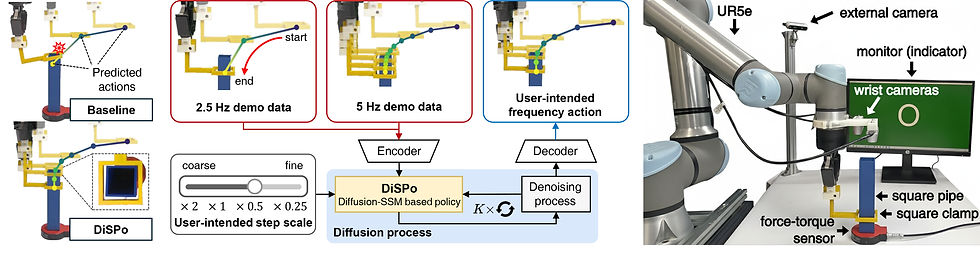
Рис. 1: Обзор DiSPo: политика на основе диффузионной SSM для обучения имитации по принципу «от грубого к тонкому». Предлагаемая нами архитектура DiSPo генерирует детализированные действия на основе грубых демонстраций, в то время как базовый метод генерирует приблизительные действия. Используя возможности диффузионной политики в области представления данных и гибкие возможности дискретизации SSM, DiSPo обучается на демонстрациях с различной степенью детализации и генерирует действия с детализацией, соответствующей замыслу пользователя. Демонстрация реальной задачи передачи зажима, требующей высокоточного управления для предотвращения столкновения.
Аннотация. Наша цель - решить проблему обучения навыкам с заданной пользователем степенью детализации на основе демонстраций с различной степенью детализации. Традиционные методы обучения по демонстрации обычно опираются на обширные наборы мелкодетализированных данных, методы интерполяции или динамические модели, которые неэффективны при кодировании или декодировании разнообразных уровней детализации, присущих навыкам. Чтобы преодолеть эту проблему, мы представляем новую политику на основе модели диффузионного пространства состояний (SSM) - DiSPo, которая использует SSM под названием Mamba для обучения на основе разнообразных демонстраций с грубой детализацией и генерации многомасштабных действий. Предлагаемый нами механизм масштабирования шагов в Mamba является ключевой инновацией, обеспечивающей обучение с эффективным использованием памяти, гибкую настройку уровня детализации и надёжное представление данных с различной степенью детализации. DiSPo превосходит передовые базовые модели на тестовых наборах «от грубого к тонкому», достигая повышения показателя успешности до 81% и одновременно повышая эффективность вывода за счёт генерации ресурсосберегающих грубых движений там, где это применимо. Мы подтверждаем масштабируемость и эффективность DiSPo на реальных сценариях манипуляций. Код и видео доступны по адресу https://robo-dispo.github.io.

Рис. 2: Иллюстрация архитектуры DiSPo. DiSPo принимает шаг диффузии k, коэффициенты масштабирования шагов rt, закодированные наблюдения ot−To+1:t и зашумленные действия a(k) t−To+1:t+Ta. Модель выявляет шум ˆε(k) t−To+1:t+Ta во входных зашумленных действиях с помощью наложенных друг на друга блоков DiSPo и использует выявленный шум для генерации менее зашумленного действия a(k−1) t−To+1:t+Ta.

Рис. 3: (a) Блок DiSPo Mi уточняет связанные с шумом признаки в кодированной по типу последовательности u(i) t с помощью adaLN, обусловленного вложением шага диффузии k. (b) Блок Mamba с масштабированием по шагам принимает rt и †u(i) t.

Рис. 4: Блок SSM с масштабированием по шагам принимает входную последовательность ‡u(i) t и rt для масштабирования Δ(i) t и дискретизирует обученные параметры SSM с использованием размеров шагов.

Рис. 5: Генерирование псевдодемонстрации для тонкой настройки. Начиная с гауссова шума ε(K) и эталонной последовательности τ₀, модель итеративно удаляет шум и заменяет w₀ действий с частотой в менее зашумленной последовательности действий на действия aw₀ ∈ τ₀ с добавленным шумом. Мы повторяем этот процесс до тех пор, пока модель не сгенерирует последовательность действий без шума с целевой частотой a(0) w_target, которую мы называем псевдодемонстрацией.

Рис. 6: Иллюстрация трёх тестов в симуляции: прохождение зажима, прохождение прохода и нажатие кнопки. Точки обозначают либо демонстрации с частотой 2,5 Гц, либо предсказанные действия, полученные с помощью DiSPo и базовых моделей.

Рис. 7: Фото реальной среды нажатия кнопок.

Рис. 8: Сравнение показателей успешности выполнения задач [%] для четырёх частот демонстраций по каждому тесту в симуляции. Мы обучаем каждый метод с исходной частотой (ось x) демонстраций и тестируем целевую частоту действий 20 Гц в новых средах. Обратите внимание, что Tracker является индикатором сложности.

Рис. 10 (слева направо): Результаты экспериментов в реальных условиях, показатели успешности (%) за 10 проб; Рис. 11: Типичные примеры, демонстрирующие выполнение манипулятором UR5e прохождения зажима и нажатия кнопок в реальной среде.
Разработанная исследовательской группой ИИ-модель «DiSPo» продемонстрировала в симуляционной среде успешность выполнения задач, превышающую показатели лучших существующих моделей на 81 %. Ожидается, что данная технология найдет применение в различных отраслях промышленности, требующих высокой точности, таких как сборка прецизионных деталей, подключение кабелей, проведение медицинских операций и прецизионная обработка.



Комментарии